С.И.Балакин, М.В.Большаков, В.П.Воеводин, А.А.Инчагов,
Л.А.Ким, Е.В.Клименков, В.А.Коковин, В.В.Комаров,
В.В.Кузнецов, Ю.В.Миличенко, Н.В.Радомский
ГНЦ РФ Институт физики высоких энергий, Протвино, Россия
Введение
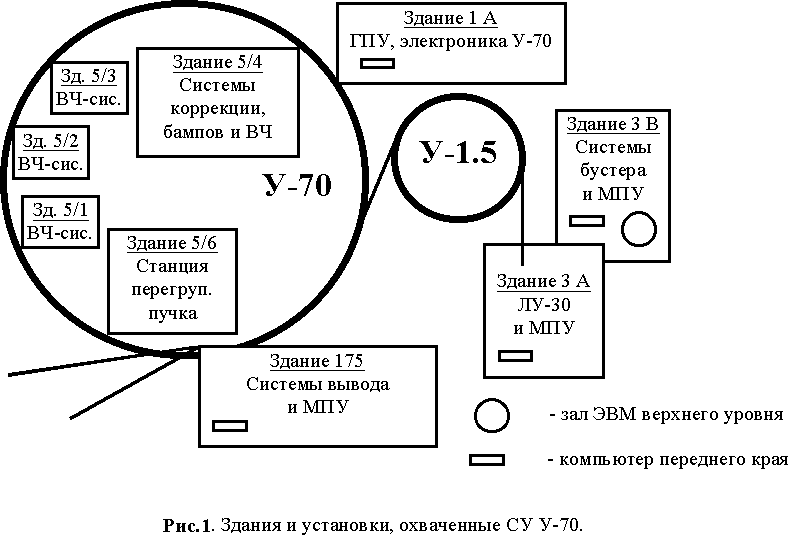
Создание новой Системы Управления ускорительного комплекса У-70 (СУ У-70) было продиктовано необходимостью существенно повысить надежность, эффективность и эксплуатабельность управляющих средств путем замены устаревшей техники, внедрения новых коммуникацонных технологий и унификации аппаратуры [1]. СУ У-70 охватывает линейный ускоритель ЛУ-30, бустер У-1.5, основной ускоритель У-70 и Системы Вывода пучка (рис.1). Проект СУ У-70 создавался в сотрудничестве с Европейским Центром Ядерных Исследований (ЦЕРН) с привлечением экспертов из других научных центров Швейцарии и Франции. Окончательный вариант (на русском языке) был готов во второй половине 1997 года [2].
Основные проектные решения
Структура аппаратных средств СУ У-70 представляет собой распределенную иерархическую вычислительную систему, состоящую из трех уровней (рис.2).
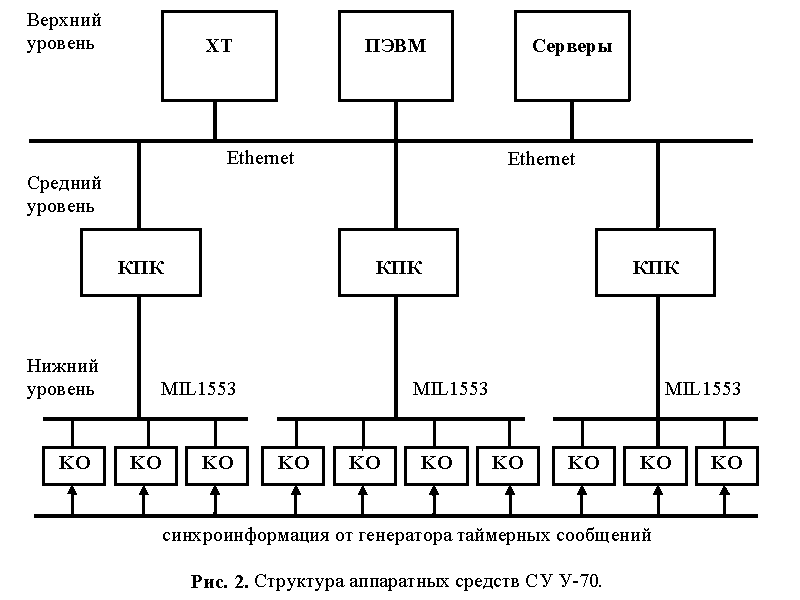
Верхний уровень включает в себя мощные компьютеры и средства общения операторов с системой управления (Х-терминалы и ПЭВМ), взаимодействующие между собой и со средним уровнем через локальную сеть Ethernet. Компьютеры верхнего уровня выполняют сложные задачи обработки различных массивов данных.
Средний уровень образуют несколько компьютеров переднего края (КПК) в стандарте VME, включающие в себя контроллеры многоотводной магистрали MIL1553. КПК обеспечивают обмен данными между верхним и нижним уровнями СУ У-70, сопрягая потоки данных между разнотипными коммуникационными средами (Ethernet и MIL1553).
Нижний уровень составляют многочисленные контроллеры оборудования (КО), собранные в крейтах Multibus-1 и подключенные к многоотводной магистрали MIL1553. Каждый КО включает в себя одноплатную микроЭВМ, терминал многоотводной магистрали (ТММ), приемник таймерных сообщений (ПТС) и модули интерфейса с технологическим оборудованием комплекса. КО выполняют задачи управления в реальном масштабе времени, принимая и декодируя посредством ПТС синхроинформацию, рассылаемую генератором таймерных сообщений.
Организация максимально унифицированного интерфейса с разнородным оборудованием комплекса представляет довольно сложную проблему. Проект предусматривает три типа интерфейсных модулей в составе КО:
- набор унифицированных модулей ввода/вывода, определяемый задачами управления КО;
- контроллер ветви СУММА (КВС), который подключает к КО находящиеся в эксплуатации крейты СУММА с технологической электроникой;
- контроллер многоотводной магистрали RS485 (КММ), связывающий КО с микроконтроллерами (МК), которые встраиваются в оборудование рассредоточенных технологических систем (рис.3).
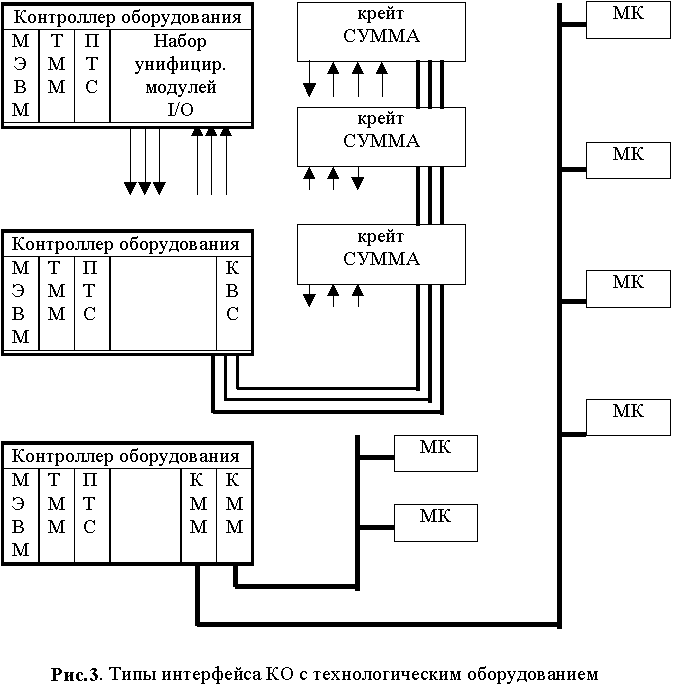
Разработка аппаратно-программных средств третьего типа была нацелена на создание универсального интерфейса для многочисленного парка источников питания магнито-оптических элементов. Практика подтвердила легкую адаптируемость микроконтроллерной системы к конкретным задачам управляемого технологического оборудования, что, в свою очередь, существенно сократило время на интеграцию в СУ У-70 новых систем ускорительного комплекса.
Архитектура программного обеспечения СУ У-70 основана на распределенной базе данных реального времени ССУДА (Специализировананная Система Управления ДАнными), которая разработана в ИФВЭ для управления динамической информацией в реальном времени. Статические данные, которые используются при развитии ПО, размещаются в БД ORACLE. БД ССУДА поддерживает трехмерные таблицы, распределенные по всем уровням системы управления, а именно, серверам, компьютерам переднего края и контроллерам оборудования. Вокруг БД ССУДА строится все программное обеспечение системы управления (рис.4).
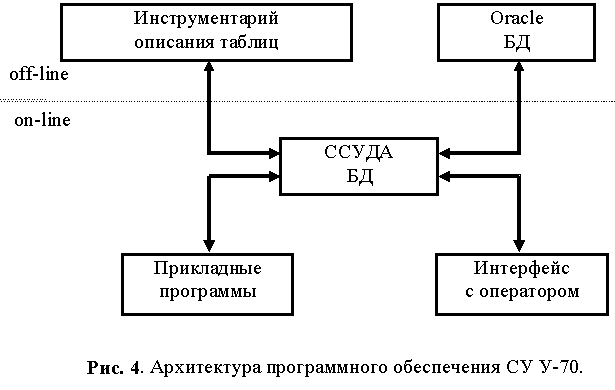
Построение ПО СУ У-70 базируется на следующих основных идеях:
- главная задача прикладных программ - обработка информации;
- данные выделяются из прикладных программ и управляются унифицированными средствами;
- доступ к оборудованию отделяется от обработки информации;
- интерфейс с пользователем отделяется от прикладных программ;
- наращивается долевой объем прикладных программ, управляемых данными.
Поддержка РРМ моды работы комплекса обеспечивается тем, что каждая плоскость трехмерной таблицы в памяти КО хранит данные соответствующего режима, которые посылаются в оборудование при поступлении таймерного сообщения, несущего информацию о номере плоскости таблицы.
Взаимодействие оператора с системой управления разделяется на две фазы: выбор управляемого/контролируемого объекта по "дереву " меню и работа с объектом. В выбранной конечной точке "дерева" меню начинается вторая фаза, когда инициируются соответствующие прикладные программы и на экране появляются соответствующие параметры - оператор получает возможность редактировать данные и выбирать форму представления данных (таблицы, графики и т.п.). Для работы в РРМ моде "дерево" меню содержит различные ветви для каждого логического ускорителя (ускорителя, работающего в данном режиме). В конечных точках этих ветвей оператор взаимодействует с тем или иным логическим ускорителем.
Реализация проекта
Выбор бустера в качестве полигона для отработки проектных решений по всему вертикальному срезу системы управления определялся следующими обстоятельствами.
Во-первых, бустер является сравнительно сложным объектом управления с точки зрения его функциональности и быстродействия, что гарантирует применимость полученных результатов на других установках комплекса, работающих в менее напряженных условиях.
Во-вторых, оперативный персонал бустера уже имел богатый опыт работы с прежней автоматизированной системой управления, следовательно, мог быть и оказался очень полезен при внедрении и отработке новых средств управления СУ У-70.
В-третьих, бустер был наиболее уязвимым звеном во всем комплексе, поскольку отказ морально и физически устаревшего компьютера ЕС1010 в составе его прежней системы управления парализовал бы всю работу установки.
К настоящему времени завершены разработка и отладка системных средств управления всех трех уровней [3]. Создана общая таймерная система, синхронизирующая работу всего парка КО с циклом ускорителя и обеспечивающая оперативное переключение запрограммированных режимов комплекса (РРМ мода управления). Решены такие принципиальные проблемы, как организация распределенной базы данных [4], транспортировка в разных коммуникационных средах больших потоков информации за ограниченное циклом ускорителя время, создание эффективного механизма взаимодействия оператора с системой управления [5,6], включающего специальные средства диагностики отказов [7], обеспечение работы КО в реальном масштабе времени ускорителя [8]. В результате проделанной работы было создано системное ядро СУ У-70, построенное на современных вычислительных, коммуникационных и информационных средствах и технологиях, которое в настоящее время выполняет свои функции в полном объеме.
На нижнем уровне собраны и интегрированы в систему управления почти три десятка КО (из 50 по проекту), в том числе, 13 КО с интерфейсом Multibus-1 - СУММА, 14 КО с интерфейсом в виде набора унифицированных модулей и 2 КО с интерфейсом Multibus-1 - RS485. Последние взаимодействуют с полусотней микроконтроллеров, встроенных в источники питания магнито- оптических элементов. Решены проблемы передачи данных и таймерной информации по многоотводной магистрали RS485 и создано соответствующее унифицированное ПО для интерфейса данного типа [9, 10].
В настоящее время автоматизированными средствами СУ У-70 охвачены следующие установки и системы комплекса:
- ЛУ-30 - вакуумная, ВЧ и локальная таймерная системы;
- Бустер (У-1.5) - системы коррекции, питания МОЭ каналов ввода и перевода, синхронизации ввода и вывода, диагностики пучка на вводе и выводе, временного программирования, радиоэлектроники, системы измерения интенсивности, орбиты и частоты бетатронных колебаний, система дозиметрического контроля;
- У-70 - системы коррекции, локального искажения орбиты, управления амплитудой ВЧ-поля и наклоном плато основного магнитного поля, системы измерения потерь и интенсивности пучка;
- Системы вывода - системы питания септумов, элементов резонансной раскачки и МОЭ каналов транспортировки, сбора и обработки статусных сигналов, системы измерения профиля, интенсивности и потерь пучка.
В течение последних двух лет был создан web-сайт "www.oku.ihep.su"", содержащий около 360 HTML-страниц (русский/английский). На сайте размещена информация о системе управления комплекса У-70, технических спецификациях ускорителей ИФВЭ и текущем состоянии работающих ускорителей. В частности, документация по системе управления включает в себя:
- основные сведения о системе управления
- правила программирования в системе управления
- публикации о системе управления
Заключение
Интеграция средств управления в новую СУ У-70 позволила снять с эксплуатации устаревшую и ненадежную вычислительную технику такую, как ЕС1010, СМ1420, Электроника-60, СМ1810. В настоящее время операторы могут работать с десятками тысяч параметров, доступных с любой консоли и отображающих текущее состояние самой системы управления и других технологических систем комплекса. Кроме того, специальные средства диагностики отказов в распоряжении операторов сокращают время простоев комплекса. СУ У-70 поддерживает до восьми текущих режимов для каждой установки, что обеспечивает большое разнообразие формируемых суперциклов при работе в РРМ моде. Внутри системы управления допускается хранение библиотеки до тридцати спасенных режимов, которые могут восстанавливаться в качестве текущих. Новые возможности, предоставляемые СУ У-70, позволяют повысить эффективность работы оперативного персонала и всего комплекса в целом.
Список литературы
[1] V.Komarov, A.Sytin, E.Troyanov, V.Voevodin, V.Yurpalov. "Upgrading of the U-70 complex controls". Proceedings of ICALEPCS'95, Chicago, Illinois,USA, 1995, V.2, p.930
[2] В.В.Комаров, В.П.Воеводин, Ю.В.Миличенко. "Технический проект системы управления комплекса У-70 (СУ У-70). (сотрудничество ИФВЭ - ЦЕРН)", 1997, Протвино, инвентарный №7399.
[3] V.Komarov, Yu.Milichenko, V.Voevodin (IHEP), Perriollat F. (CERN). "New Integrated Control System of IHEP Accelerators Complex". Proceedings of ICALEPCS'99, Trieste, Italy, 1999, p.639.
[4] В.П.Воеводин. "ССУДА - Специализированная Система Управления распределенными Данными реального времени". Труды XVI Совещания по ускорителям заряженных частиц. Протвино, 1998, т. 1, с. 135.
[5] В.П.Воеводин, В.Г.Кузьменко, С.Е.Щербаков. "Пользовательский интерфейс в новой системе управления ускорительного комплекса У-70". Труды XVI Совещания по ускорителям заряженных частиц. Протвино, 1998, т. 1, с. 141.
[6] В.П.Воеводин, Е.В.Клименков, С.В.Комаров, Ю.В.Миличенко. "Инструментальные средства графического отображения функциональных зависимостей между параметрами ускорителей" (данное совещание).
[7] В.П.Воеводин, Е.В.Клименков, С.В.Комаров. "Контроль текущего состояния комплекса и доступа к ресурсам системы управления У-70" (данное совещание).
[8] С.И.Балакин, В.П.Воеводин, Е.В.Клименков. "Организация прикладного программного обеспечения контроллеров оборудования в новой системе управления комплексом У-70". Труды XVI Совещания по ускорителям заряженных частиц". Протвино, 1998, т. 1, с. 176.
[9] С.И.Балакин, В.П.Воеводин, А.А.Инчагов, В.В.Комаров. "Архитектура встроенных микроконтроллеров в системе управления комплекса У-70". Труды XVII Совещания по ускорителям заряженных частиц. Протвино, 2000, т. 1, с. 319.
[10] С.И.Балакин, В.П.Воеводин, М.Н.Горохов, А.А.Инчагов, Ю.Г.Каршев, Е.В.Клименков, В.В.Комаров, Г.Т.Кузьмин, В.А.Медведев, В.А. Новиков. "Управление источниками питания систем вывода и локального искажения орбиты У-70" (данное совещание).